We are doing this project in order to understand the interworking of household objects and learn to accurately represent these tools in a 3D workspace for object manipulation. In this case, we took apart a standard 7200 RPM 320 GB Hard Disk Drive and recreated the drive heads and interworkings of the casing.
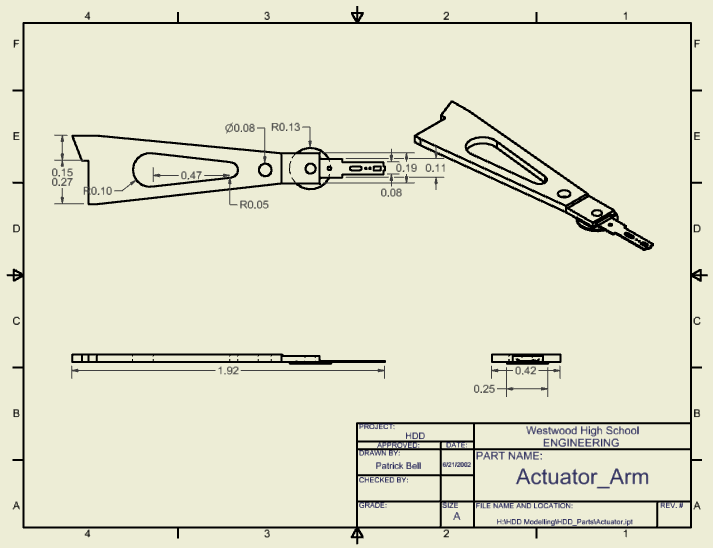
This is the actuator arm. It's purpose is to read and write dat ausing the drive head (located on the far right side of the arm) and relay the data back to the SoC. This allows for fast reading of data from all over the drive platters.
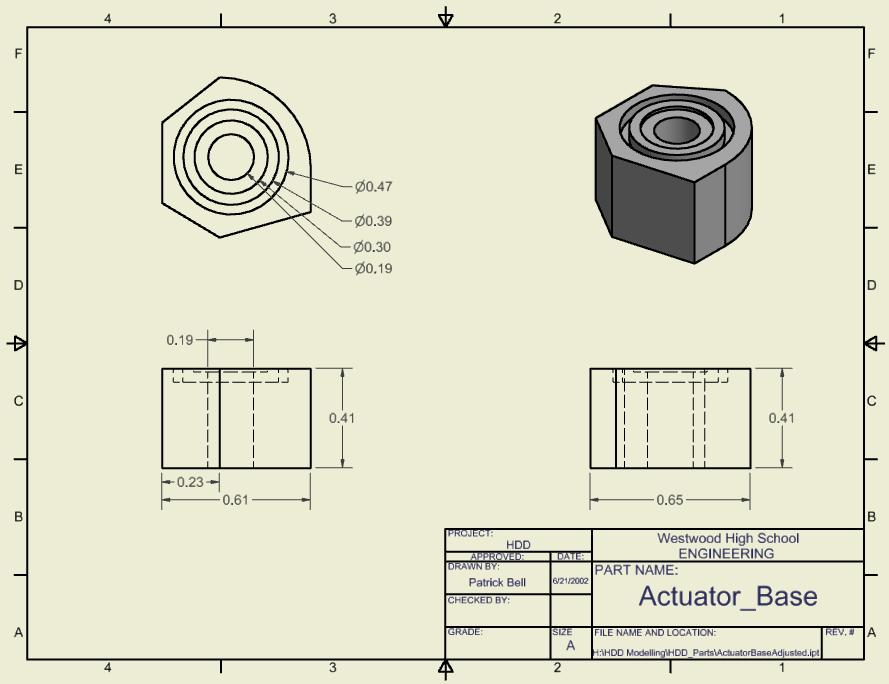
This is the actuator base. This piece is connected to all 3 of the actuator arms, and rotates using electromagnets to get accurate reads from different sectors of the drive platter.
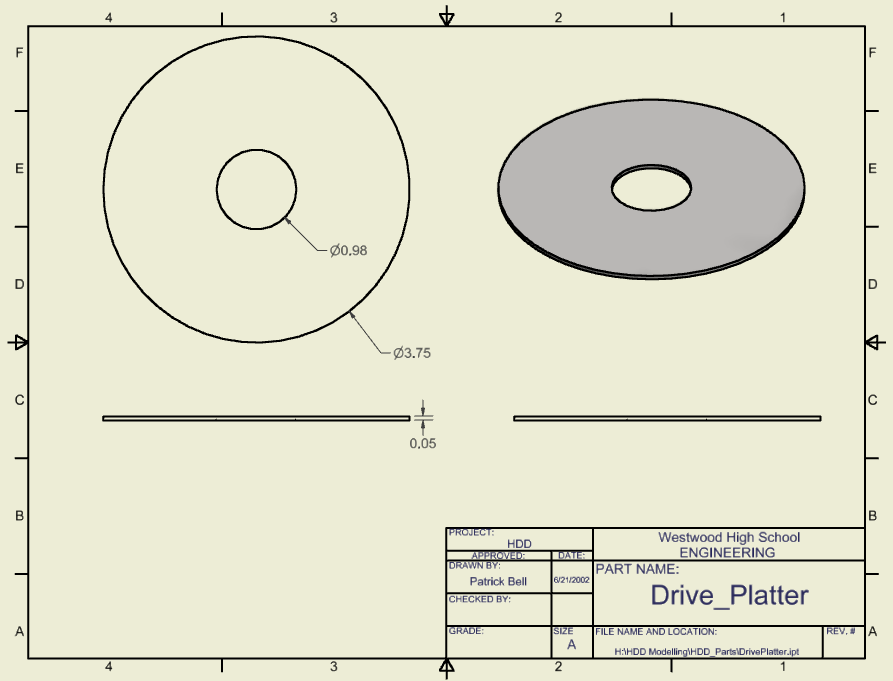
This is the drive platter. This stores all of the data using small magnetic shifts in order to store data as either '0' or '1'. In this HDD in particular, each disk platter holds 8.8e+11 bits, to a total of 320 GB.
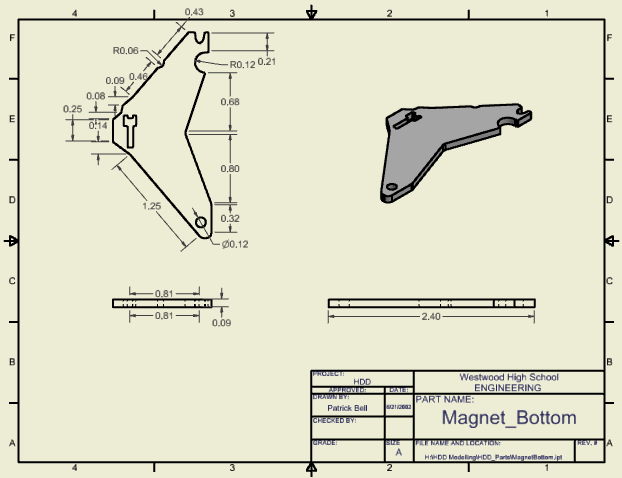
This is the magnet bottom. This part of the enclosure is used to keep the actuator arm from fluctuating to wrong read position. It contains a very strong electromagnet which unfortunately shattered immediately upon trying to remove it.
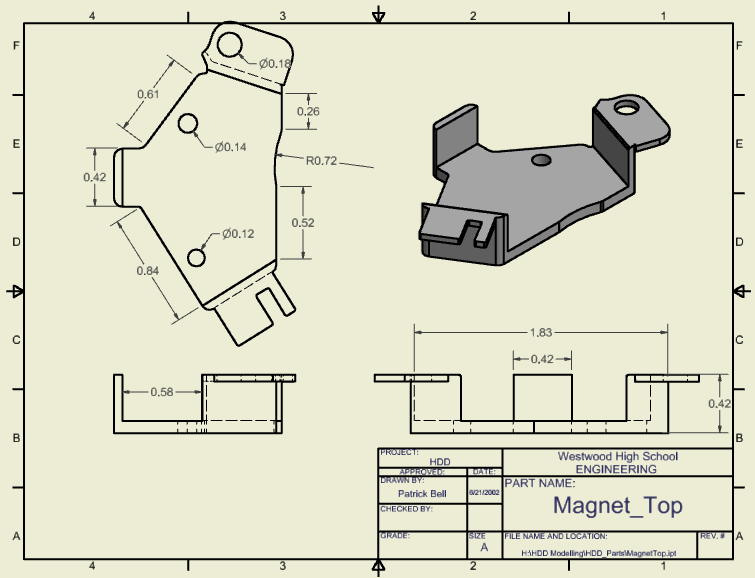
This is the magnet top. This connects to the top of the magnet and keeps the arms in place. It is connected to the casing in two different positions in order to maintain a rigid position for the actuator base to rotate in.
